SDK:
Git Repository:https://github.com/IntelRealSense/librealsense/releases/tag/v2.50.0
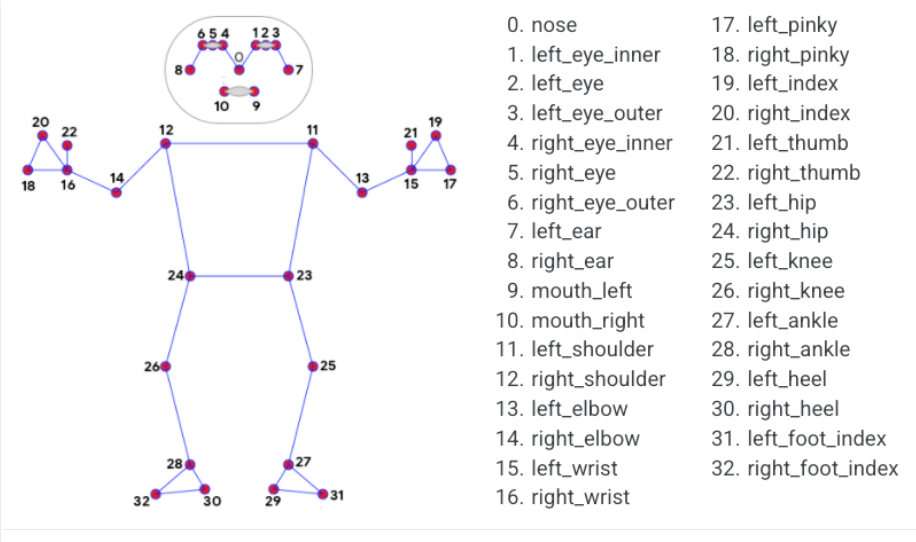
https://www.analyticsvidhya.com/blog/2021/05/pose-estimation-using-opencv/
Visual Odometry
- Google Cartographer
- GMapping
- Hector SLAM
- RTabMap
- ORB SLAM
- Rovio

Robotic Operating System
OpenSource SLAM
On Raspberry:
https://issueexplorer.com/issue/IntelRealSense/librealsense/9865
Below is practice on Windows 10
Ensure to use correct python to install modules, otherwise, you may get error:
ModuleNotFoundError: No module named
python -m pip install pyrealsense2
pip uninstall pyrealsense2
python -m pip install opencv-python
https://github.com/BakingBrains/Pose_estimation
Link to the Youtube video: https://www.youtube.com/watch?v=brwgBf6VB0I
# Skeleton Tracking
python -m pip install --find-links="%CUBEMOS_SKEL_SDK%\wrappers\python" cubemos.skeletontracking
cd "%CUBEMOS_SKEL_SDK%\wrappers\python"
cd "%CUBEMOS_SKEL_SDK%\samples\python\"
c. Run the sample on a local image
python skeleton-tracking-image.py ..\res\images\skeleton_estimation.jpg
To save the results you can use an additional parameter:
python skeleton-tracking-image.py -o C:\tmp\output.jpg `
..\res\images\skeleton_estimation.jpg